
Simulation as support for route planning in robotic vehicles
Robotic vehicles are automated vehicles that handle transportation tasks in many different places. However, route planning is needed to perform these transport tasks. The increasing number of various robotic vehicles and their operational environments necessitate more complex routing algorithms. Simulation can be used to test and evaluate the success of route planning.
Today, robotic vehicles come in various sizes, from small transport robots to larger and heavier vehicles. With robotic vehicles, different operational environments and other agents moving within them are emphasized. Other agents include, for example, other robotic vehicles or human-driven vehicles. The challenge becomes how to route different robotic vehicles to their transport tasks efficiently and without colliding with other agents.
Route planning requires routing algorithms that optimize, for example, the speed of task execution or the shortest route. However, the same optimization problem must be solved for all vehicles, possibly under changing conditions. Complexity and different factors to optimize create the need to test the effectiveness and success of routing algorithms. Simulation, which allows for the examination of various configurations and scenarios, can assist in testing and evaluation.
The solution: Simulation
Simulation is a process in which reality is imitated using a model that describes the behavior of the phenomenon. The model typically contains parameters for testing different situations. The accuracy of the simulation depends on the model’s accuracy; a too-detailed model can be laborious and obscure, while a too-general model may weaken the reliability of the simulation.
In the case of robotic vehicles, both the vehicles and their operating environment must be modeled. Vehicle features include, for example, dimensions, shape, and mobility. The environment’s feature is to describe where vehicles can drive and whether there are possible other obstacles on the driving routes. The environment model can also include pickup and delivery areas for transport tasks.
For testing route planning, the simulation must incorporate different routing algorithms that generate driving routes for vehicles as the simulation progresses. The simulation must also warn of problems such as collisions between two vehicles.
The importance of visualization
Visualization is particularly important, if not essential, for simulation. The main task of visualization is to facilitate the examination of simulation results. For example, it is easier to see where robotic vehicles collide than to infer the same from the simulation’s data structures.
In route planning simulation, the vehicles and the environment do not necessarily need to be visually detailed. It is essential that individual vehicles and their routes are identifiable and distinguishable from each other. For the environment, a floor plan-like description of the driving map may suffice, showing where vehicles move.
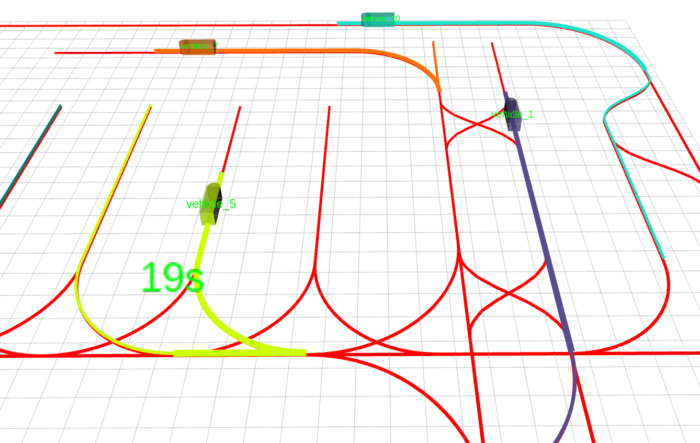
For visualization, it is also crucial to have warnings for problem situations in route planning. The warning must be attention-grabbing but at the same time as unambiguous as possible. The visual warning should indicate, for example, the vehicles involved in the situation and the driving routes or other points where the problem occurs.
The future of simulation
As the use of robotic vehicles and their diverse operational environments become more common, the need for various optimization solutions also grows. This requires broader testing and evaluation of route planning options. With continuously advancing technology, simulation becomes an increasingly central part of route planning and testing, which supports developers in creating safer and more efficient transportation solutions.

Santeri Kangas
Software Developer
I started as a software designer at Atostek in the spring of 2023. I graduated as a Master of Science in Technology in Computer Science in the spring of 2024. During the last year, I have worked on, for example, a routing simulator, welding camera equipment, and a medical device. I wrote my master’s thesis on the routing simulation of a robot vehicle fleet.