
Simulointi robottiajoneuvojen reitinsuunnittelun tukena
Robottiajoneuvot ovat automatisoituja ajoneuvoja, jotka hoitavat kuljetustehtäviä monessa eri paikassa. Kuljetustehtävien suorittamiseen tarvitaan kuitenkin reitinsuunnittelua. Erilaisten robottiajoneuvojen määrä ja toimintaympäristöjen lisääntyminen aiheuttavat tarpeen yhä monimutkaisemmille reititysalgoritmeille. Simuloinnilla voidaan testata ja arvioida reitinsuunnittelun onnistumista.
Nykypäivänä robottiajoneuvoja löytyy useassa eri koossa pienistä kuljetusroboteista isompiin ja raskaampiin ajoneuvoihin. Robottiajoneuvojen kohdalla korostuvat erilaiset toimintaympäristöt ja niissä liikkuvat muut toimijat. Muita toimijoita ovat esimerkiksi toiset robottiajoneuvot tai ihmisten ajamat ajoneuvot. Ongelmaksi muodostuu, miten eri robottiajoneuvot reititetään kuljetustehtävilleen tehokkaasti ja törmäämättä muihin toimijoihin.
Reitityksessä tarvitaan reititysalgoritmeja, jotka optimoivat esimerkiksi kuljetustehtävän suoritusnopeutta tai lyhintä reittiä. Sama optimointiongelma täytyy kuitenkin ratkaista kaikille ajoneuvoille ja vielä mahdollisesti muuttuvissa olosuhteissa. Monimutkaisuus ja erilaiset optimoitavat tekijät luovat tarpeen testata reititysalgoritmien toimivuutta ja onnistumista. Testaamisessa ja arvioinnissa voidaan käyttää apuna simulointia, joka mahdollistaa erilaisten kokoonpanojen ja skenaarioiden tarkastelun.
Ratkaisuna simulointi
Simulointi on prosessi, jossa jäljitellään todellisuutta käyttäen ilmiön käyttäytymistä kuvaavaa mallia. Malli sisältää tyypillisesti parametreja eri tilanteiden kokeilemiseksi. Simulaation tarkkuus riippuu mallin tarkkuudesta; liian yksityiskohtainen malli voi olla työläs ja vaikeaselkoinen, kun taas liian yleistävä malli saattaa heikentää simuloinnin luotettavuutta.
Robottiajoneuvojen tapauksessa täytyy mallintaa sekä ajoneuvot että niiden toimintaympäristö. Ajoneuvojen ominaisuuksia ovat esimerkiksi mittasuhteet, muoto ja liikkumiskyky. Toimintaympäristön ominaisuutena on kuvata, missä ajoneuvot voivat ajaa ja onko ajoreiteillä mahdollisia muita esteitä. Toimintaympäristöstä voidaan mallintaa myös kuljetustehtävien nouto- ja toimitusalueita.
Reitinsuunnittelun testaamisen kannalta simulaatioon täytyy saada liitettyä erilaisia reititysalgoritmeja, jotka simuloinnin edetessä tuottavat ajoneuvoille ajoreittejä. Simulaation täytyy myös varoittaa ongelmista kuten kahden ajoneuvon välisestä törmäyksestä.
Visualisoinnin tärkeys
Visualisointi on erityisen tärkeää ellei jopa välttämätöntä simuloinnin kannalta. Visualisoinnin keskeisenä tehtävänä on helpottaa simuloinnin tulosten tarkastelua. On esimerkiksi helpompi nähdä missä kohtaa robottiajoneuvot törmäävät kuin päätellä sama asia simuloinnin tietorakenteista.
Reitinsuunnittelun simuloinnissa ajoneuvojen ja toimintaympäristön ei välttämättä tarvitse olla visuaalisesti yksityiskohtaisia. Oleellista on, että yksittäiset ajoneuvot ja niiden ajoreitit ovat tunnistettavissa ja erotettavissa keskenään. Toimintaympäristöstä voi riittää pohjapiirustusmainen kuvaus ajokartasta, josta samalla nähdään missä ajoneuvot liikkuvat.
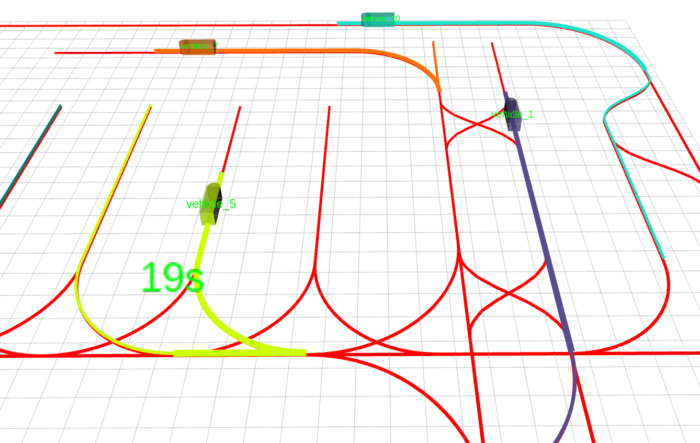
Visualisoinnin kannalta on keskeistä myös reitinsuunnittelun ongelmatilanteiden varoitukset. Varoituksen täytyy olla huomiota herättävä mutta samaan aikaan mahdollisimman yksiselitteinen. Visuaalisesta varoituksesta tulee käydä ilmi esimerkiksi ajoneuvot, joita tilanne koskee ja ajoreitit tai muu kohta, jossa ongelmatilanne syntyy.
Simuloinnin tulevaisuus
Kun robottiajoneuvojen käyttö ja niiden moninaiset toimintaympäristöt yleistyvät, kasvaa myös erilaisten optimointiratkaisujen tarve. Tämä edellyttää laajempaa reitinsuunnittelun testausta ja vaihtoehtojen arviointia. Jatkuvasti kehittyvän teknologian myötä simulointi muodostuu yhä keskeisemmäksi osaksi reitinsuunnittelua ja testaamista, mikä tukee kehittäjiä turvallisempien ja tehokkaampien kuljetusratkaisujen luomisessa.

Santeri Kangas
Ohjelmistosuunnittelija
Aloitin Atostekilla ohjelmistosuunnittelijana keväällä 2023. Valmistuin keväällä 2024 tietotekniikan diplomi-insinööriksi. Viimeisen vuoden aikana olen työskennellyt esimerkiksi reitityssimulaattorin, hitsauskameralaitteiston ja lääkinnällisen laitteen parissa. Diplomityöni kirjoitin robottiajoneuvoryhmän reitityksen simuloinnista.