Liikkuvat laitteet ja software only -testaus
Software only -testauksella tarkoitetaan liikkuvien laitteiden automaatiossa nimensä mukaisesti pelkästään ohjelmistojen avulla tehtävää testausta. Mitä software only -testauksessa kannattaa ottaa huomioon ja mitä välineitä siihen on tarjolla?
Kun testaus toteutetaan virtualisoimalla ja simuloimalla, onnistuu softan monistaminen helposti ja testauksen määrä skaalautuu helposti. Testausta ei myöskään tarvitse suorittaa erikseen testikentällä, vaan testaus voidaan toteuttaa ohjelmistojen avulla riittävän realistisella tarkkuudella.
Simulaattorit työkaluina
Simulointi on mahdollista toteuttaa yhdistelemällä pääosin avoimen lähdekoodin ohjelmistoja, mutta myös kaupallisia ohjelmistoja. Vaikka soveltuvia simulaatiotyökaluja on tarjolla, on ne kuitenkin aina räätälöitävä yhteensopiviksi testattavan ohjelmiston kanssa ja luotava realistinen testiympäristö.
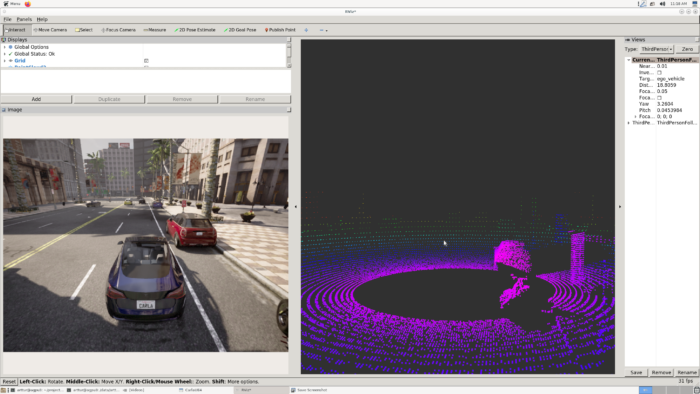
Simulaattoreilla voidaan tuottaa laadukasta simuloitua sensoritietoa, mutta tieto on muokattava sellaiseen muotoon, että se on ymmärrettävää testattavalle ohjelmistolle. Testattavan ohjelmiston näkökulmasta tieto tulee muokata samanlaiseksi kuin mitä se olisi oikealta sensorilta tullessa.
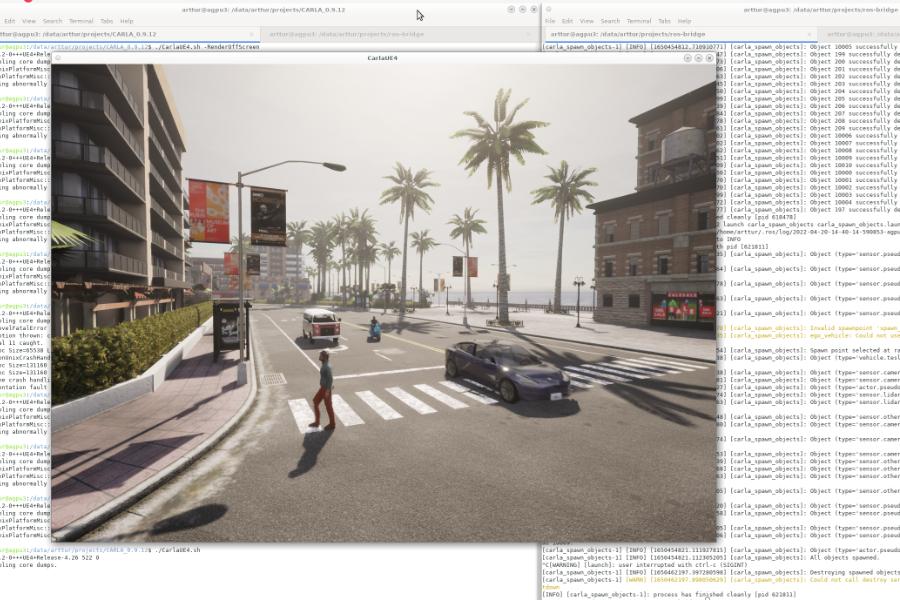
Esimerkiksi Gazeboa käytetään liikkuvien koneiden simuloinnissa. Se tarjoaa esimerkiksi eritasoisia fysiikkamoottoreita sekä sensorisimulaatiota. Simulaattorista kuitenkin puuttuu valmiit fyysisen maailman mallit koneille ja ympäristölle, jolloin testausympäristöjen rakentaminen ja ylläpito saattaa olla kallista ja monimutkaista. CARLA taas on erityisesti autoteollisuuden käyttöön suunniteltu simulaattori, joka tarjoaa valmiita ympäristöjä ja ajoneuvomalleja sensorisimulaation lisäksi.
Software only -testaus käytännössä
Software only -testauksesta on hyötyä esimerkiksi teollisuuden koneohjausjärjestelmille, joissa on automaattisesti liikkuvaa laitteistoa ja raskaita työkoneita. Atostekilla on Gazeboa hyödyntäen pystytetty software only -testausympäristö olemassa olevalle ohjausjärjestelmälle. Tämä mahdollistaa tulevaisuudessa laajemman testauksen jo ennen ohjausjärjestelmän viemistä oikeaan koneeseen ja testikentälle.
Lisäksi Atostek on toteuttanut Flexbot-kehitysframeworkin helpottamaan liikkuvien laitteiden ohjelmistojen kehittämistä. Flexbot on toteutettu Rust-ohjelmointikielellä, jota käytetään turvallisuusfokusoituneissa ympäristöissä. Flexbot on myös yhteensopiva ROS2:sen (Robot Operating System 2) kanssa. ROS2-robotiikkaa hyödyntäen Flexbotilla toteutettu koneenohjausjärjestelmä voidaan yhdistää CARLAan, jolloin software only -testausta on mahdollista hyödyntää.

Arttu Ruusiala
Ohjelmistosuunnittelija

Ida Pellinen
Markkinointi- ja viestintäasiantuntija
